محاسبه قیمت درایو موتور (آنلاین)
اهمیت راهاندازی صحیح موتور
راه اندازی موتور 55 کیلووات القایی به روش صحیح تنها یک مرحله اجرایی نیست، بلکه تعیینکننده عمر مفید، بازدهی و ایمنی سیستم است. خطاهای راهاندازی میتوانند منجر به:
- آسیبهای الکتریکی: سوختن سیمپیچها، عایقها و کنتاکتورها به دلیل جریان راهاندازی بالا یا نامتعادلی فاز.
- آسیبهای مکانیکی: شوک گشتاوری در راهاندازی مستقیم باعث فشار زیاد به کوپلینگ، یاتاقان و گیربکس میشود.
- کاهش بازده و افزایش مصرف انرژی: راهاندازی نامناسب باعث افزایش تلفات و کاهش ضریب قدرت در لحظات اولیه میشود.
- توقفهای غیرمنتظره و هزینههای تعمیراتی: یک راهاندازی نادرست میتواند ظرف چند ماه منجر به خرابی موتور یا تجهیزات جانبی شود.
ویدعویی از راه اندازی با اینورتر موتور 55 کیلووات:
🔧 مثال: در یک پمپ آب صنعتی، راهاندازی DOL بدون در نظر گرفتن جریان راهاندازی (۶ تا ۸ برابر جریان نامی) با احتمال بالا باعث تریپ مکرر کلید MCCB و سوختن رله حرارتی میشود. با جایگزینی روش Soft Starter، مشکل بهطور کامل رفع میشود.
انواع موتور و اینورتر موتور 55 کیلووات
دو نوع اصلی موتورهای القایی 55 کیلووات در صنعت مورد استفاده قرار میگیرند:

الف) موتور قفس سنجابی
– ساختار
روتور از میلههای مسی یا آلومینیومی تشکیل شده که در دو انتهایشان به حلقههای اتصال کوتاه شده متصلاند.
– مزایا
سادگی ساخت، نگهداری کم، قیمت مناسب، قابلیت اطمینان بالا.
– معایب
گشتاور راهاندازی پایین نسبت به جریان بالا، عدم امکان کنترل مستقیم گشتاور راهاندازی.
– کاربردها
پمپها، فنها، کمپرسورها، نوار نقاله.
ب) موتور روتور سیمپیچی شده
– ساختار
روتور دارای سیمپیچهای 55 کیلووات است که از طریق حلقههای لغزان به مقاومت خارجی متصل میشود.
– مزایا
امکان کنترل گشتاور و جریان راهاندازی با اضافه کردن مقاومت در مدار روتور.
– معایب
پیچیدگی مکانیکی، نیاز به نگهداری حلقههای لغزان، قیمت بالاتر.
– کاربردها
جرثقیلها، آسیابها، ماشینآلاتی با بار سنگین در راهاندازی مانند سنگ شکن ها.
📊 مقایسه کاربردی: در کارخانههای تولید سیمان، برای آسیابهای عمودی که نیاز به گشتاور راهاندازی بالا دارند، اغلب از موتورهای روتور سیمپیچی شده استفاده میشود. در مقابل، برای فنهای تهویه، موتورهای قفس سنجابی کافی و مقرونبهصرفهاند.

پارامترهای الکتریکی اینورتر موتور 55 کیلووات
ولتاژ راه اندازی موتور 55 کیلووات
برای درایو موتور 55 کیلووات، ولتاژ تغذیه موتور باید دقیقاً برابر با ولتاژ نامی روی پلاک موتور باشد (مثلاً 380V یا 400V). انحراف از این مقدار تأثیرات جدی دارد:
– کاهش ولتاژ (مثلاً به 340V):
– افزایش جریان برای جبران کاهش گشتاور.
– گرمایش بیش از حد سیمپیچها.
– کاهش گشتاور راهاندازی ← احتمال عدم راهاندازی بار و جریان کشی بیش از حد.
– افزایش ولتاژ (مثلاً به 440V):
– افزایش شار مغناطیسی ← اشباع هسته ← افزایش جریان مغناطیسی و تلفات.
– کاهش عمر عایقی.
– نامتعادلی فاز در راه اندازی موتور 55 کیلووات(حتی 2%):
– ایجاد جریانهای منفی و صفر ← گرمایش نامتقارن.
– کاهش گشتاور مؤثر.
– افزایش لرزش و صدا.
استاندارد: طبق IEC 60034-1، موتورها باید در محدوده ±10% ولتاژ نامی و نامتعادلی فاز کمتر از 1% کار کنند. نامتعادلی 3% میتواند عمر موتور را تا 50% کاهش دهد.
جریان درایو موتور 55 کیلووات
جریان راهاندازی معمولاً ۶ تا ۸ برابر جریان نامی است. این جریان:
– تأثیر بر تجهیزات بالادست:
باعث تریپ فیوزها، کلیدهای مغناطیسی و رلههای حفاظتی میشود.
– تأثیر بر شبکه:
افت ولتاژ لحظهای در شبکه داخلی ← اختلال در کار سایر تجهیزات حساس.
– تأثیر بر کابلها:
ایجاد تنش حرارتی و مکانیکی در کابلها و اتصالات.
📉 مثال عددی:
یک موتور kw55 با جریان نامی 30 آمپر، در لحظه راهاندازی ممکن است تا 210 آمپر جریان بکشد.
اگر کابل یا فیوز بر اساس جریان نامی انتخاب شده باشد، بدون در نظر گرفتن ضریب راهاندازی، دچار مشکل خواهد شد.
روشهای درایو موتور 55 کیلووات
راهاندازی نرم (Soft Start)
– اصول کار: کاهش ولتاژ اعمالی به موتور در لحظه راهاندازی با استفاده از تریستورهای کنترلشده با زاویه آتش.
– مزایا:
– کاهش جریان راهاندازی به 2.5 تا 4 برابر جریان نامی.
– کاهش شوک گشتاوری ← کاهش استرس مکانیکی.
– قابلیت تنظیم زمان راهاندازی و ولتاژ اولیه.
– معایب:
– هزینه بالاتر نسبت به DOL.
– تولید هارمونیک (نیاز به فیلتر در برخی موارد).
– عدم تغییر دور در حین کار.
– کاربردها: پمپها، فنها، نوار نقاله، کمپرسورها.
راه اندازی موتور 55 کیلووات به روش مستقیم (DOL — Direct On Line)
– اصول کار:
اعمال ولتاژ شبکه به موتور از طریق یک کنتاکتور.
– مزایا:
– سادهترین و ارزانترین روش.
– گشتاور راهاندازی بالا (مناسب برای بارهای سبک).
– معایب:
– جریان راهاندازی بسیار بالا (۶-۸ برابر).
– شوک مکانیکی به سیستم.
– کاربردها: موتورهای کوچک (کمتر از kw55)، فنهای کوچک، ماشینآلات سبک.
درایو موتور 55 کیلووات ستاره-مثلث (Star-Delta)
– اصول کار: راهاندازی در اتصال ستاره (کاهش ولتاژ به 58% و جریان به 33%) و سپس سوئیچ به مثلث.
– مزایا:
– کاهش جریان راهاندازی به 1/3 حالت DOL.
– هزینه متوسط، بدون تولید هارمونیک.
– معایب:
– گشتاور راهاندازی فقط 1/3 DOL ← برای بارهای بزرگ مناسب نیست.
– شوک گشتاوری در لحظه سوئیچ از ستاره به مثلث.
– شرایط استفاده: موتورها باید قابلیت اتصال مثلث در ولتاژ شبکه را داشته باشند (مثلاً 380V مثلث / 660V ستاره).
کنترل دور با درایو (VFD — Variable Frequency Drive)

– اصول کار: تغییر فرکانس و ولتاژ خروجی برای کنترل سرعت و گشتاور موتور.
– مزایا:
– کنترل دقیق سرعت و گشتاور.
– درایو موتور 55 کیلووات بدون جریان زیاد (با شیب ولتاژ/فرکانس).
– صرفهجویی انرژی در بارهای متغیر (مثلاً پمپ و فن).
– قابلیت معکوسسازی و ترمز الکتریکی.
– معایب:
– هزینه بالا.
– تولید هارمونیک ← نیاز به فیلتر و کابل.
– حساسیت به نویز و محیط نصب.
– نکات نصب و EMC:
– استفاده از کابلهای سه هادی با زمین کردن دو طرف شیلد.
– نصب فیلتر EMI/RFI در ورودی و خروجی.
– فاصله کوتاه بین VFD و موتور (ترجیحاً کمتر از 30 متر).
– زمین کردن جداگانه بدنه VFD و موتور.
| روش راهاندازی | جریان راهاندازی | گشتاور راهاندازی | هزینه | کاربرد مناسب |
|---|---|---|---|---|
| DOL | 6~8 × In | 100% | پایین | موتورهای کوچک، بار سبک |
| ستاره-مثلث | 2~3 × In | 33% | متوسط | بارهای سبک تا متوسط بدون نیاز به گشتاور اولیه بالا |
| Soft Starter | 2.5~4 × In | قابل تنظیم | متوسط-بالا | بارهای متوسط، کاهش شوک مکانیکی |
| VFD | 1~1.5 × In | قابل کنترل دقیق | بالا | بارهای متغیر، نیاز به کنترل دور، صرفهجویی انرژی |
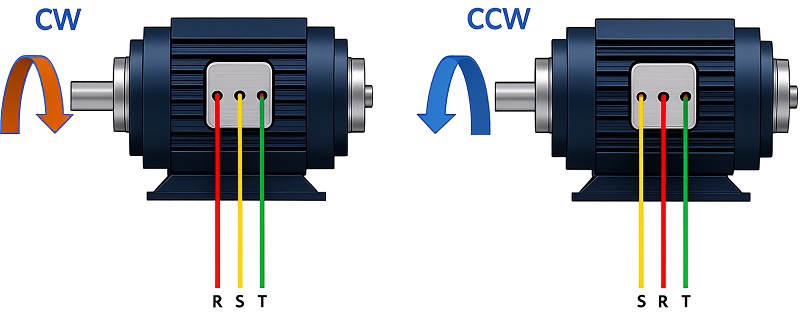
جهت چرخش موتور
در راه اندازی موتور 55 کیلووات و کنترل موتور، جهت چرخش موتور القایی 55 کیلووات به توالی فازهای ورودی بستگی دارد. توالی R-S-T معمولاً چرخش ساعتگرد (CW) و توالی R-T-S چرخش پادساعتگرد (CCW) را ایجاد میکند.
معکوس کردن چرخش موتور
سه روش رایج:
جابجایی دو فاز در ورودی موتور:
– سادهترین روش — فقط در حالت خاموشی موتور انجام شود.
استفاده از کنتاکتور معکوس (Forward-Reverse Contactor):
– دو کنتاکتور با قفل مکانیکی و الکتریکی.
– یکی برای جلو، دیگری برای عقب.
– مدار فرمان دارای اینترلاک برای جلوگیری از همزمان بسته شدن.
استفاده از VFD:
– تغییر جهت از طریق دستور دیجیتال یا HMI.
– بدون نیاز به جابجایی فیزیکی سیمها.
⚠ نکته ایمنی: در حین کار موتور، هرگز نباید فازها جابهجا شوند — خطر برقگرفتگی و آسیب به موتور وجود دارد.
نوع بار متصل به موتور
تغییر بار موتور هنگام کار
– بار متغیر (مثلاً نوار نقاله وقتی بارهای مختلفی حمل میکند): باعث نوسان جریان ← نیاز به رله حرارتی با تنظیم دقیق یا حفاظت الکترونیکی دارد.
– بار ضربهای (مثلاً پرس): نیاز به موتور با گشتاور راهاندازی بالا و تحمل Overload کوتاهمدت.
– تأثیر بر حرارت و یاتاقان: بارهای نامتقارن یا ضربهای باعث افزایش دما و فرسودگی زودرس یاتاقان مخصوصا در راه اندازی موتور 55 کیلووات میشوند.
گشتاور ثابت/متغیر
– بار با گشتاور ثابت:
– گشتاور مستقل از سرعت.
– مثال: نوار نقاله، آسانسور، کمپرسور پیستونی.
– نمودار دور-گشتاور: خط افقی در نمودار گشتاور-سرعت.
– بار با گشتاور متغیر:
– گشتاور متناسب با مربع سرعت.
– مثال: پمپ سانتریفیوژ، فن.
– نمودار دور-گشتاور: منحنی.
📈 نکته کاربردی: روش VFD در بارهای متغیر (فن/پمپ) بیشترین صرفهجویی انرژی را دارد — چون توان مصرفی متناسب با مکعب سرعت کاهش مییابد. مثلاً کاهش سرعت به 80% ← کاهش توان به 51%.
تغییر دور موتور
سه روش اصلی:
تغییر قطب (Pole Changing):
– تغییر تعداد قطبهای سیمپیچ استاتور.
– فقط در موتورهای خاص (مثل موتورهای کولر آبی).
– محدودیت: تعداد سرعت محدود، تغییر پلکانی.
تغییر لغزش (Slip Control):
– با اضافه کردن مقاومت در مدار روتور (فقط در موتورهای روتور سیمپیچی شده).
– بازده پایین — به دلیل تلفات در مقاومت.
تغییر فرکانس (VFD) ← روش مدرن و کاربردی:
– کنترل پیوسته سرعت از 0 تا بالاتر از نامی (با تقویت ولتاژ در فرکانس بالا).
– کنترل گشتاور در حالت V/f یا Vector Control.
– قابلیت کنترل حلقه بسته با فیدبک انکودر.
🎯 تمرکز بر VFD:
امروزه بهدلیل دقت، انعطافپذیری و صرفهجویی انرژی، VFD تنها روش منطقی برای تغییر دور در اکثر کاربردها محسوب میشود.
اتصال به زمین:
– بدنه موتور و تابلو باید به زمین متصل شود (مقاومت زمین کمتر از 5 اهم).
– استفاده از کابل زمین جداگانه (PE) با سطح مقطع برابر فازها.
اضافه کردن فیلتر داخلی
در سیستمهای مجهز به VFD یا Soft Starter، فیلترهای EMI/RFI ضروری هستند:
– علت نیاز:
سوئیچینگ سریع تریستورها/IGBTها ← تولید نویز فرکانس بالا ← تداخل با سیستمهای کنترل، سنسورها و ارتباطات.
– انواع فیلترها:
– فیلتر ورودی (Line Filter):
جلوگیری از بازگشت هارمونیک به شبکه در اینورتر موتور 55 کیلووات.
– فیلتر خروجی (Motor Filter / dV/dt Filter):
محافظت از عایق موتور در برابر شیب ولتاژ بالا.
– فیلتر Sinusoidal:
تبدیل خروجی PWM به موج سینوسی نزدیک — برای موتورهای قدیمی یا با فاصله طولانی.
کابلکشی صحیح در اینورتر موتور 55 کیلووات:
– کابل بین VFD و موتور حتماً باید سه کابله + شیلد باشد.
– شیلد در دو طرف (VFD و موتور) به زمین متصل شود.
– رعایل فاصله کابلهای کنترل و قدرت.
⚠ هشدار: عدم استفاده از فیلتر و کابل مناسب در VFDها میتواند منجر به سوختن زودرس عایق موتور (بهویژه در موتورهای قدیمی) و اختلال در درایو شود.
✅ نتیجهگیری
راه اندازی موتور 55 کیلووات، ترکیبی از دانش فنی، انتخاب روش مناسب، رعایت استانداردها و مدیریت بار است. انتخاب روش راهاندازی (DOL، ستاره-مثلث، Soft Starter یا VFD) باید بر اساس نوع بار، جریان مجاز شبکه، بودجه و نیاز به کنترل دور انجام شود. همیشه به یاد داشته باشید:
“ارزانترین روش درایو موتور 55 کیلووات، گرانترین روش تعمیر است.”
رعایت نکات ایمنی، استفاده از حفاظتهای مناسب و نصب صحیح فیلترها و کابلها، نهتنها عمر موتور را افزایش میدهد، بلکه از خطرات جانی و مالی جلوگیری میکند.

مطالب مرتبط:
قیمت انواع درایو